Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
Kindly refer to the list of papers about traffic signal control in reinforcement learning, especially for some special traffic situation (including some traffic flow control papers) from my friend and colleague Zhenyuan Ma , which we collected together.
Published:
This is my paper reading list concerning current interesting graph network problems. Papers are classified by methods and sorted by descending-year orders. The format of each paper follows Title (Journal/Conference/Review_forum Year). Particularly, I will have preference on how graph network can help solve spatial-temporal problems. Because my reading list are very limited, you are highly welcome to help complete the paper reading list.
Published:
This notebook and source code can be find via my github
Published:
Short description of portfolio item number 1
Published:
Short description of portfolio item number 2
Published in , 2024
McGill University, Sep. 2020 ~ Nov. 2020
Advisor: Prof. Lijun Sun
Co-worker: Yuankai Wu
Full text can be requested through e-mail
Published in , 2024
McGill University, Sep. 2020 ~ Aug. 2021
Advisor: Prof. Lijun Sun
Publication: IEEE Transactions on Intelligent Transportation Systems Resources: doi
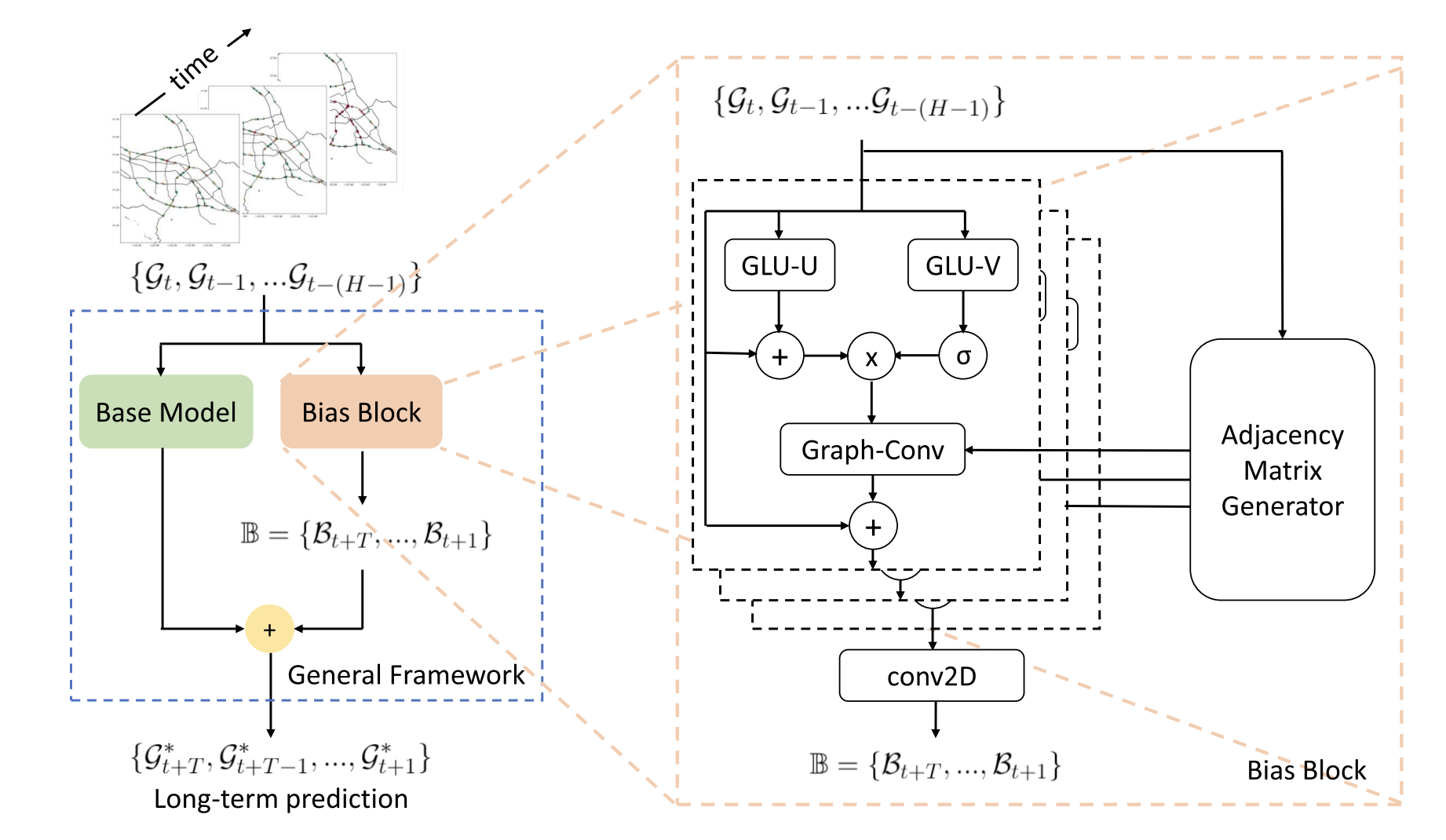
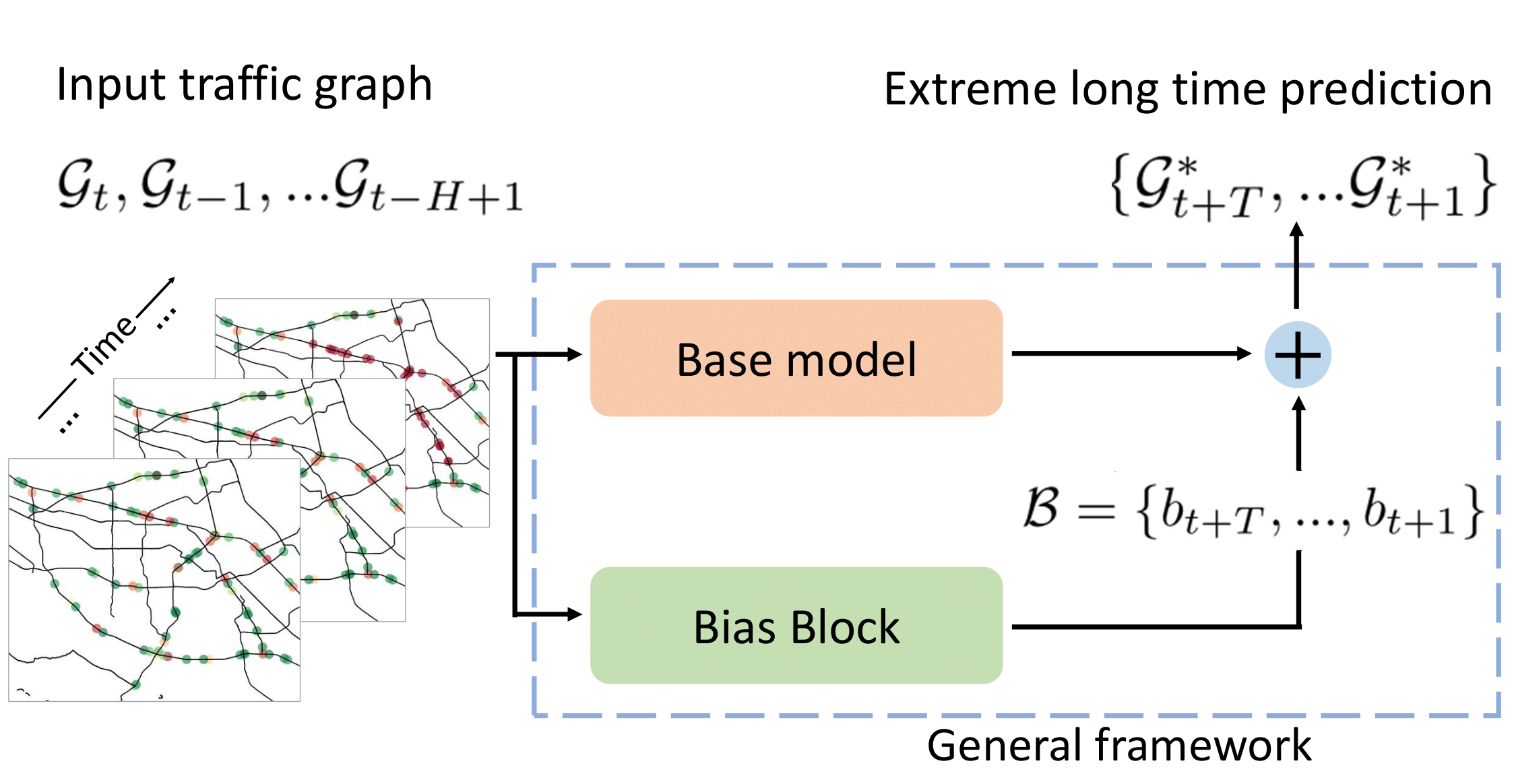
Recent studies have demonstrated the great success of graph convolutional networks in short-term traffic forecasting (e.g., 15-30 min ahead) tasks by capturing dependencies in road network structure. Based on these models, long-term forecasting can be achieved by two approaches: (1) recursively generating a one-step-ahead prediction and (2) adapting the models to sequence-to-sequence (seq2seq) learning. However, in practice, these two approaches often show poor performance in long-term forecasting tasks. The recursive approach suffers from the error accumulation problem, as the model is trained based on one-stepahead loss. On the other hand, seq2seq shows convergence issues that limit its application. To address the issues for long-term forecasting, in this paper, we propose a universal framework that directly transforms any existing state-of-the-art models for onestep-ahead prediction to achieve more accurate long-term forecasting. The proposed framework consists of two components a base model and a bias block. The base model is assumed to be a well-trained state-of-the-art one-step-ahead forecasting model, and the bias block is constructed by a spatiotemporal graph neural network composed of gated temporal convolution layers and graph convolution layers. The base model and the bias block are residually-connected so that we can substantially reduce the training complexity. Extensive experiments are conducted on existing benchmark datasets. We experiment with several state-of-the-art models in the literature as base models, and our results demonstrate the ability of the proposed universal framework to greatly improve the long-term prediction accuracy for all models.
Published in , 2024
Shanghai Jiao Tong University, Mar. 2017 ~ June. 2018
Advisor: Prof. Jiangang Jin
Publication: International Journal of Sustainable Transportation
Resources: DOI
Published in , 2024
McGill University, May. 2020 ~ Aug. 2020
Advisor: Prof. Lijun Sun
Resources: PDF
Published in , 2024
Massachusetts Institute of Technology, Sep. 2021 ~ Mar. 2022
Advisor: Prof. Cathy Wu, Prof. Jinhua Zhao
Co-worker: Yuzhu Huang, Vindula Jayawardana, Dajiang Suo
Publication: 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)
Resources: ar5iv Video for Understanding Video for Mitigating
The Braess’s Paradox (BP) is the observation that adding one or more roads to the existing road network will counter-intuitively increase traffic congestion and slow down the overall traffic flow. Previously, the existence of the BP is modeled using the static traffic assignment model, which solves for the user equilibrium subject to network flow conservation to find the equilibrium state and distributes all vehicles instantaneously. Such approach neglects the dynamic nature of real-world traffic, including vehicle behaviors and the interaction between vehicles and the infrastructure. As such, this article proposes a dynamic traffic network model and empirically validates the existence of the BP under dynamic traffic. In particular, we use microsimulation environment to study the impacts of an added path on a grid network. We explore how the network flow, vehicle travel time, and network capacity respond, as well as when the BP will occur.
The Braess’s Paradox (BP) is the observation that adding one or more roads to the existing road network will increase traffic congestion and slow down the overall traffic flow. In the context of traffic assignment, BP is usually proven by assuming that the travel cost for taking each road is related to the number of vehicles on it and that all vehicles are distributed instantaneously. Such assumption may not be accurately representing the BP phenomenon in real-world traffic scenarios. If BP is examined in a non-instantaneous, dynamic case, can we use mixed autonomy to mitigate the congestion introduced by the shortest path? In this project, we use the Flow project to design and simulate driver behaviors on a rotary road network with and without a shortcut. We find that BP exists within a certain number of vehicles. We try to alleviate the congestion caused by BP by adding autonomous vehicles (AVs) and applying reinforcement learning (RL) algorithm Proximal Policy Optimization (PPO) for control. Results show that the AV learns not to attenuate traffic but blocks the road for better system efficiency. This project is related to the Unit 3 contents about Markov Decision Process and deep reinforcement learning.
Published in , 2024
Massachusetts Institute of Technology, Sep. 2021 ~ Aug. 2022
Advisor: Prof. Haris N Koutsopoulos, Prof. Jinhua Zhao
Co-worker: Baichuan Mo
Full text can be requested through e-mail
Published in , 2024
Massachusetts Institute of Technology, Aug. 2022 ~ Oct. 2023
Advisor: Prof. Shenhao Wang, Prof. Haris N Koutsopoulos, Prof. Jinhua Zhao
Publication: Proceedings of the 28th ACM SIGKDD Conference on Knowledge Discovery and Data Mining
Resources: KDD (Video included) ar5iv GitHub DOI
Published in , 2024
MIT, Sep. 2021 ~ May. 2023
Advisor: Prof. Shenhao Wang, Prof. Jinhua Zhao
Resources: doi
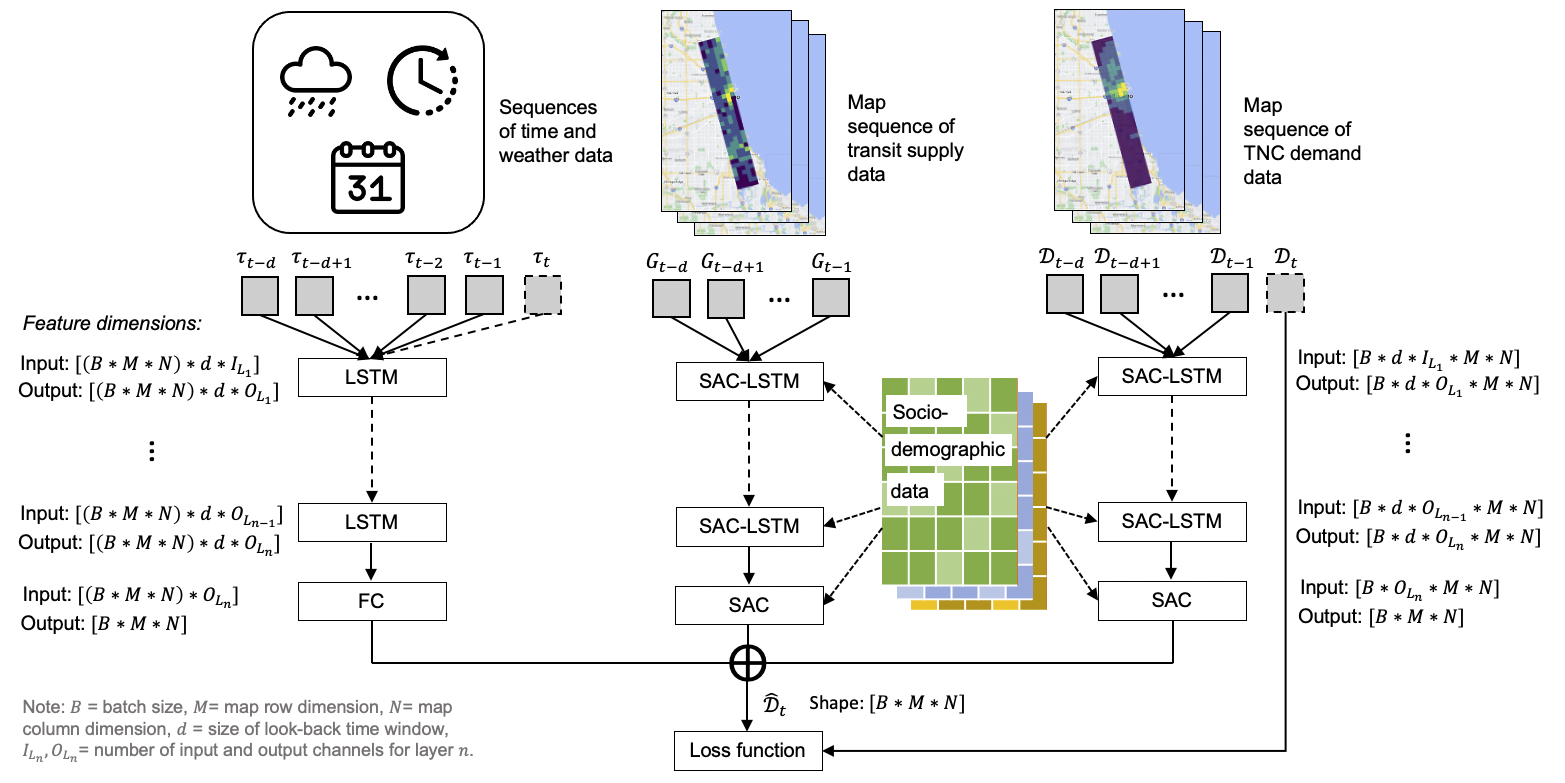
Short-term demand forecasting for on-demand ride-hailing services is one of the fundamental issues in intelligent transportation systems. However, previous travel demand forecasting research predominantly focused on improving prediction accuracy, ignoring fairness issues such as systematic underestimations of travel demand in disadvantaged neighborhoods. This study investigates how to measure, evaluate, and enhance prediction fairness between disadvantaged and privileged communities in spatial-temporal demand forecasting of ride-hailing services. A two-pronged approach is taken to reduce the demand prediction bias. First, we develop a novel deep learning model architecture, named socially aware neural network (SA-Net), to integrate the socio-demographics and ridership information for fair demand prediction through an innovative socially-aware convolution operation. Second, we propose a bias-mitigation regularization method to mitigate the mean percentage prediction error gap between different groups. The experimental results, validated on the real-world Chicago Transportation Network Company (TNC) data, show that the de-biasing SA-Net can achieve better predictive performance in both prediction accuracy and fairness. Specifically, the SA-Net improves prediction accuracy for both the disadvantaged and privileged groups compared with the state-of-the-art models. When coupled with the bias mitigation regularization method, the de-biasing SA-Net effectively bridges the mean percentage prediction error gap between the disadvantaged and privileged groups, and also protects the disadvantaged regions against systematic underestimation of TNC demand. Our proposed de-biasing method can be adopted in many existing short-term travel demand estimation models, and can be utilized for various other spatial-temporal prediction tasks such as crime incidents predictions.
Published in , 2024
McGill University, Dec. 2019 ~ Feb. 2020
Advisor: Prof. Lijun Sun
Co-worker: Fuqiang Liu, Jiawei Wang, Jingbo Tian and Prof. Luis Miranda-Moreno
Publication: IEEE Transactions on Intelligent Transportation System
Resources: I-TIS DOI
Published in , 2024
MIT, Mar. 2023 ~ June. 2023
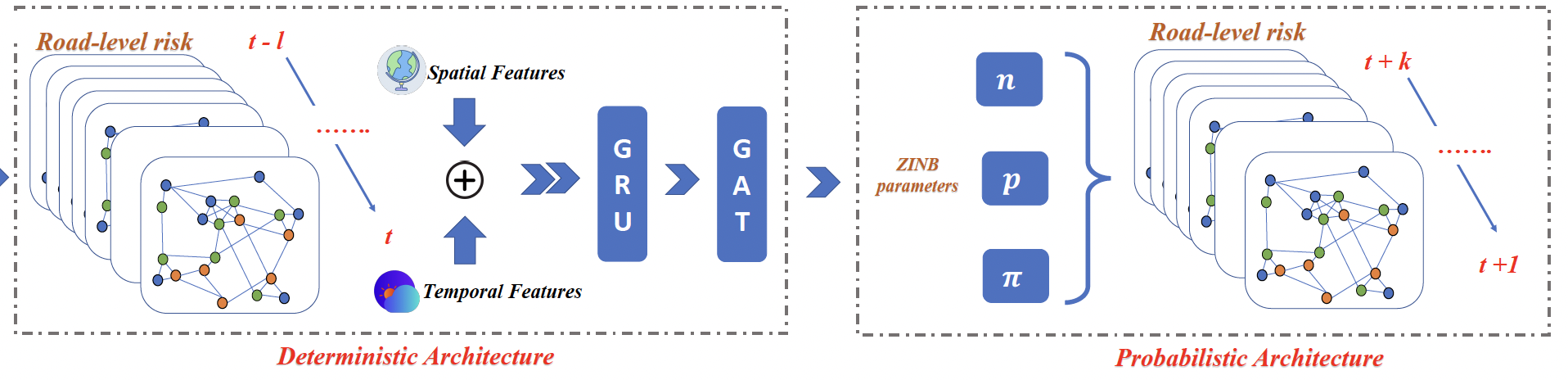
Urban road-based risk prediction is a crucial yet challenging aspect of research in transportation safety. While most existing studies emphasize accurate prediction, they often overlook the importance of model uncertainty. In this paper, we introduce a novel Spatial-Temporal Zero-Inflated Negative Binomial Graph Neural Network (STZINB-GNN) for road-level traffic risk prediction, with a focus on uncertainty quantification. Our case study, conducted in the Lambeth borough of London, UK, demonstrates the superior performance of our approach in comparison to existing methods. Although the negative binomial distribution may not be the most suitable choice for handling real, non-binary risk levels, our work lays a solid foundation for future research exploring alternative distribution models or techniques. Ultimately, the STZINB-GNN contributes to enhanced transportation safety and data-driven decision-making in urban planning by providing a more accurate and reliable framework for road-level traffic risk prediction and uncertainty quantification.
Published in , 2024
McGill University, Apr. 2020 ~ Jun. 2020
Advisor: Prof. Lijun Sun
Co-worker: Yuankai Wu
Publication: Proceedings of the AAAI Conference on Artificial Intelligence
Resources: AAAI ar5iv GitHub DOI
Published in , 2024
Massachusetts Institute of Technology, Aug. 2023 ~ Feb. 2024
Advisor: Prof. Jinhua Zhao
Publication: KDD Urban Computing Workshop Resources: arxiv
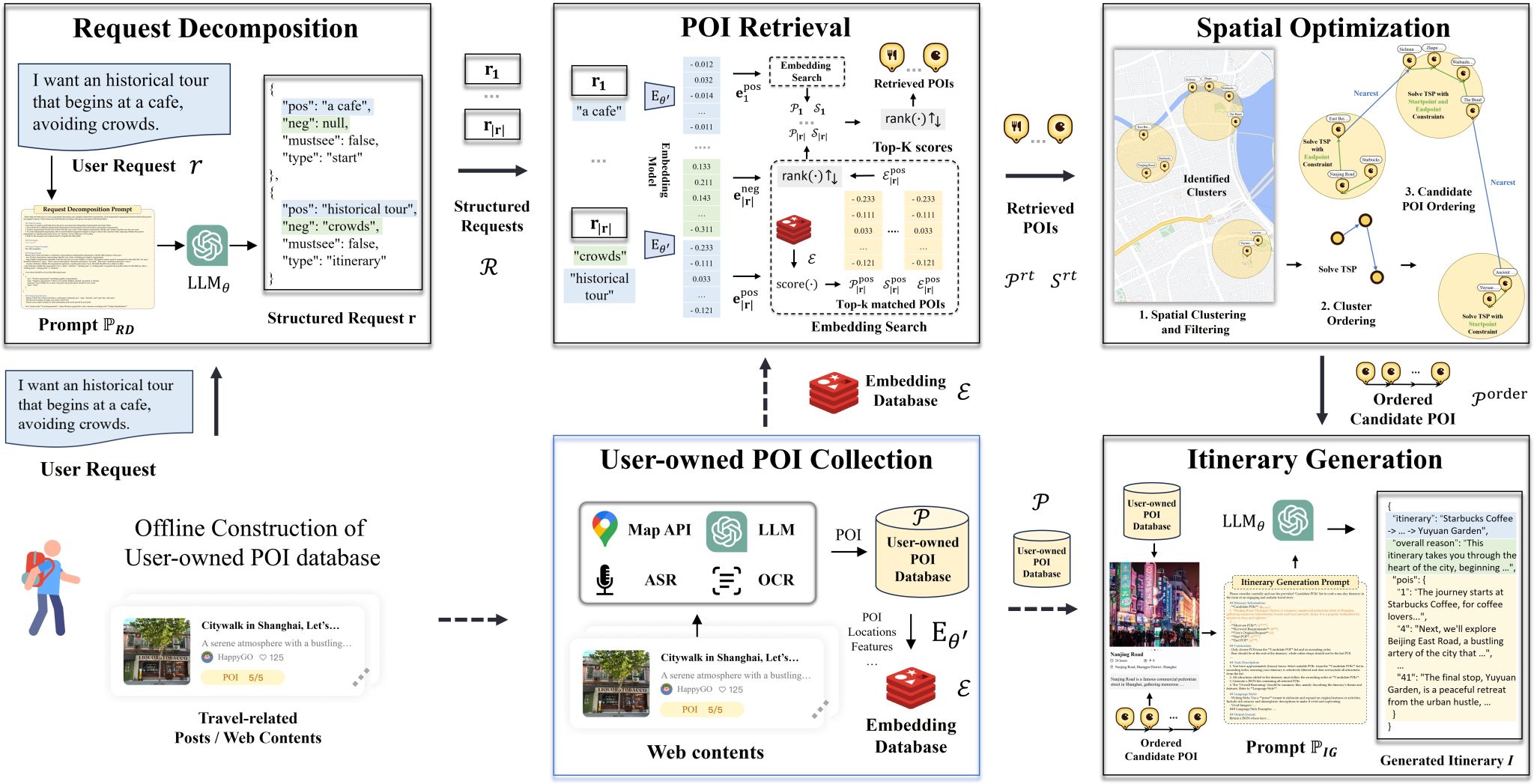
In this paper, we introduce Open-domain Urban Itinerary Planning (OUIP) for city walks, a new approach that generates itineraries based on natural language user requests, unlike conventional methods that limit personalization. Our system, ItiNera, combines spatial optimization with large language models (LLMs) to customize urban itineraries. ItiNera uses an LLM pipeline to create and update a personalized database of points of interest (POIs) and a spatial optimization module to organize these POIs into a coherent itinerary. Experiments show ItiNera outperforms current LLM-based solutions in creating responsive and coherent itineraries. It is now used in the TuTu online travel service, attracting thousands of users.
Published in , 2024
Massachusetts Institute of Technology, Aug. 2023 ~ Jan. 2024
Advisor: Prof. Jinhua Zhao
Publication: TRC-30 Resources: arxiv
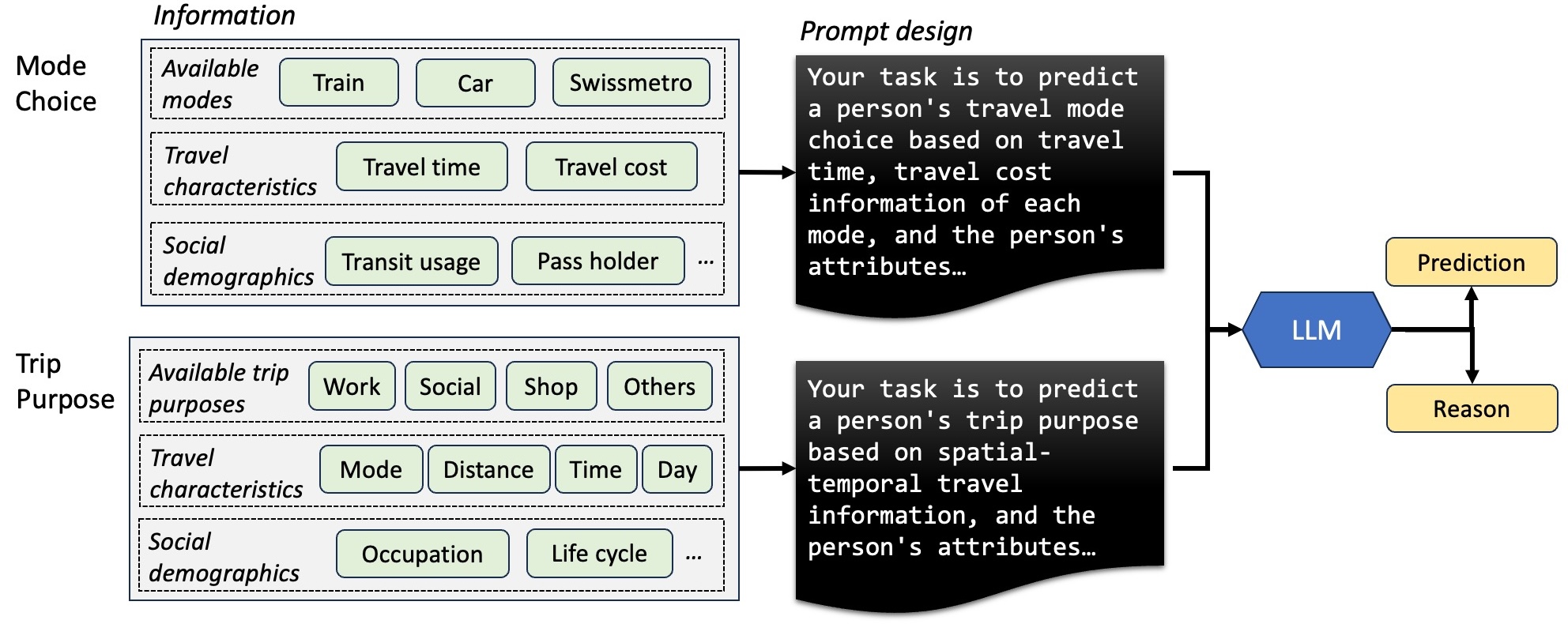
Travel behavior prediction is a fundamental task in transportation demand management. The conventional methods for travel behavior prediction rely on numerical data to construct mathematical models and calibrate model parameters to represent human preferences. Recent advancement in large language models (LLMs) has shown great reasoning abilities to solve complex problems. In this study, we propose to use LLMs to predict travel behavior with prompt engineering without data-based parameter learning. Specifically, we carefully design our prompts that include 1) task description, 2) travel characteristics, 3) individual attributes, and 4) guides of thinking with domain knowledge, and ask the LLMs to predict an individual’s travel behavior and explain the results. We select the travel mode choice task as a case study. Results show that, though no training samples are provided, LLM-based predictions have competitive accuracy and F1-score as canonical supervised learning methods such as multinomial logit, random forest, and neural networks. LLMs can also output reasons that support their prediction. However, though in most of the cases, the output explanations are reasonable, we still observe cases that violate logic or with hallucinations.
Published in , 2024
McGill University, Feb. 2021 ~ Jun. 2021
Advisor: Prof. Lijun Sun
Co-worker: Xudong Wang , Yuankai Wu
Resources: ar5iv GitHub
Published in , 2024
McGill University, Feb. 2021 ~ Jun. 2021
Advisor: Prof. Lijun Sun
Co-worker: Yuankai Wu , Mengying Lei, Aurelie Labbe
Resources: ar5iv
Published in , 2024
Massachusetts Institute of Technology, Aug. 2023 ~ Feb. 2024
Advisor: Prof. Shenhao Wang, Prof. Jinhua Zhao
Publication: NeurIPS Temporal Graph Learning Workshop (Best paper candidate) Resources: Openreview
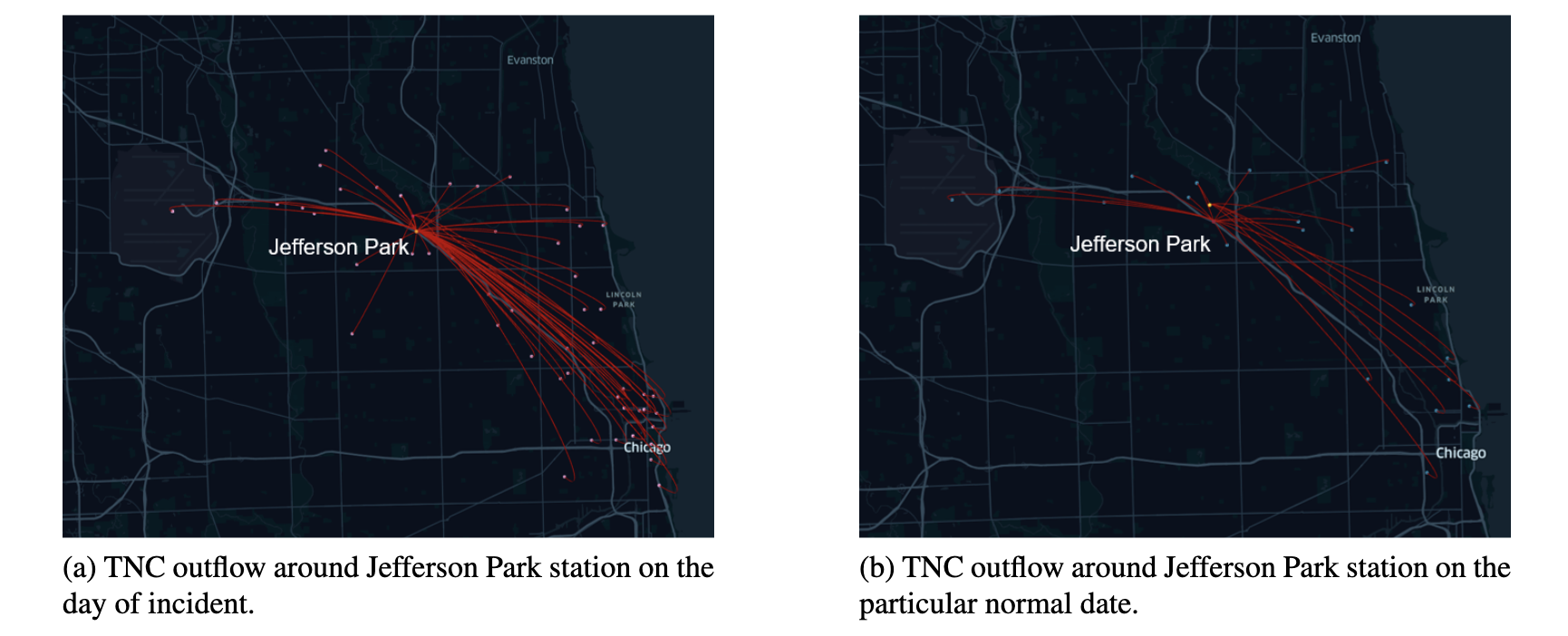
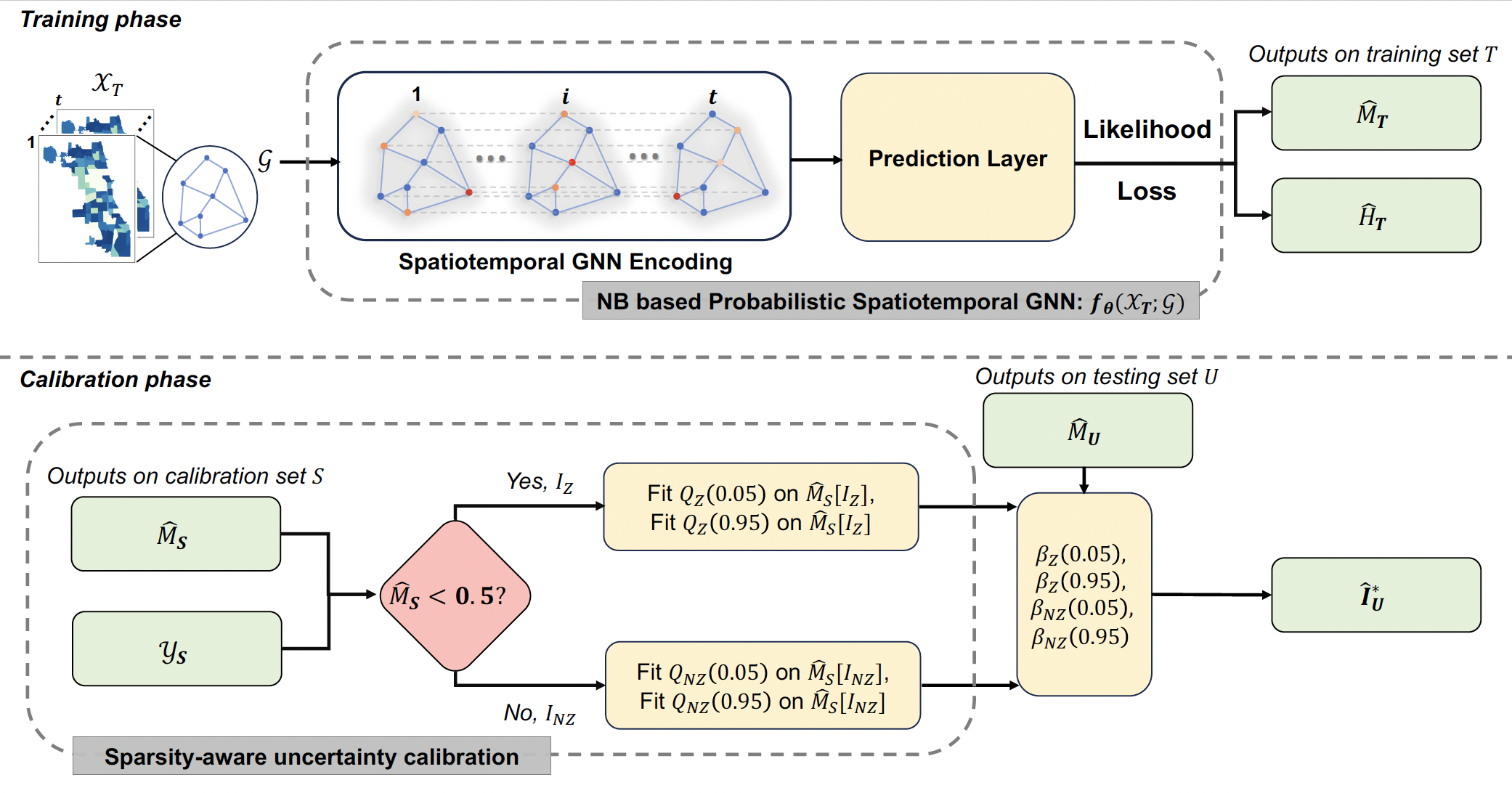
Quantifying uncertainty is crucial for robust and reliable predictions. However, existing spatiotemporal deep learning mostly focuses on deterministic prediction, overlooking the inherent uncertainty in such prediction. Particularly, highly-granular spatiotemporal datasets are often sparse, posing extra challenges in prediction and uncertainty quantification. To address these issues, this paper introduces a novel post-hoc Sparsity-aware Uncertainty Calibration (SAUC) framework, which calibrates uncertainty in both zero and non-zero values. To develop SAUC, we firstly modify the state-of-the-art deterministic spatiotemporal Graph Neural Networks (ST-GNNs) to probabilistic ones in the pre-calibration phase. Then we calibrate the probabilistic ST-GNNs for zero and non-zero values using quantile approaches. Through extensive experiments, we demonstrate that SAUC can effectively fit the variance of sparse data and generalize across two real-world spatiotemporal datasets at various granularities. Specifically, our empirical experiments show a 20\% reduction in calibration errors in zero entries on the sparse traffic accident and urban crime prediction. Overall, this work demonstrates the theoretical and empirical values of the SAUC framework, thus bridging a significant gap between uncertainty quantification and spatiotemporal prediction.
Published in , 2024
McGill University, Mar. 2020 ~ May. 2020
Advisor: Prof. Lijun Sun
Co-worker: Zhenyuan Ma
Resources: Video GitHub

Published in , 2024
MIT, Sep. 2021 ~ May. 2023 Advisor: Prof. Shenhao Wang, Prof. Jinhua Zhao Resources: arxiv
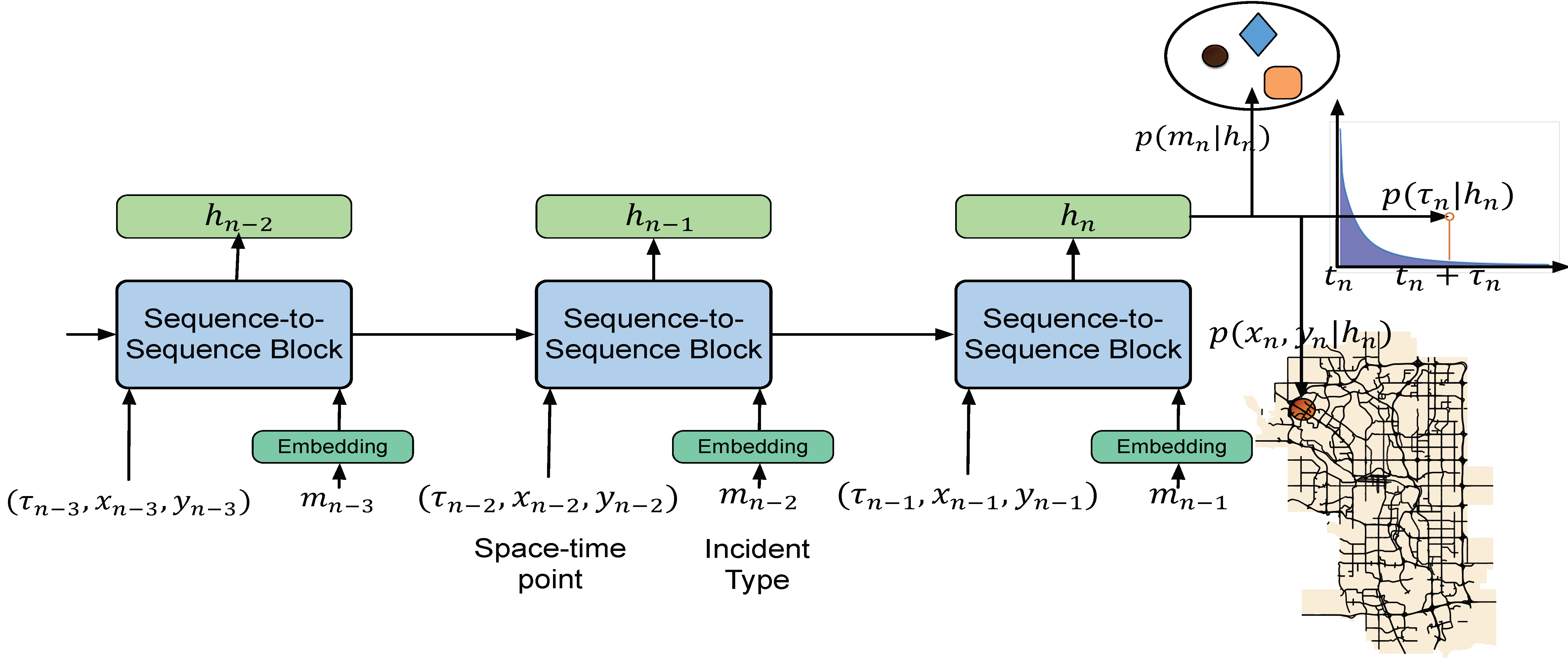
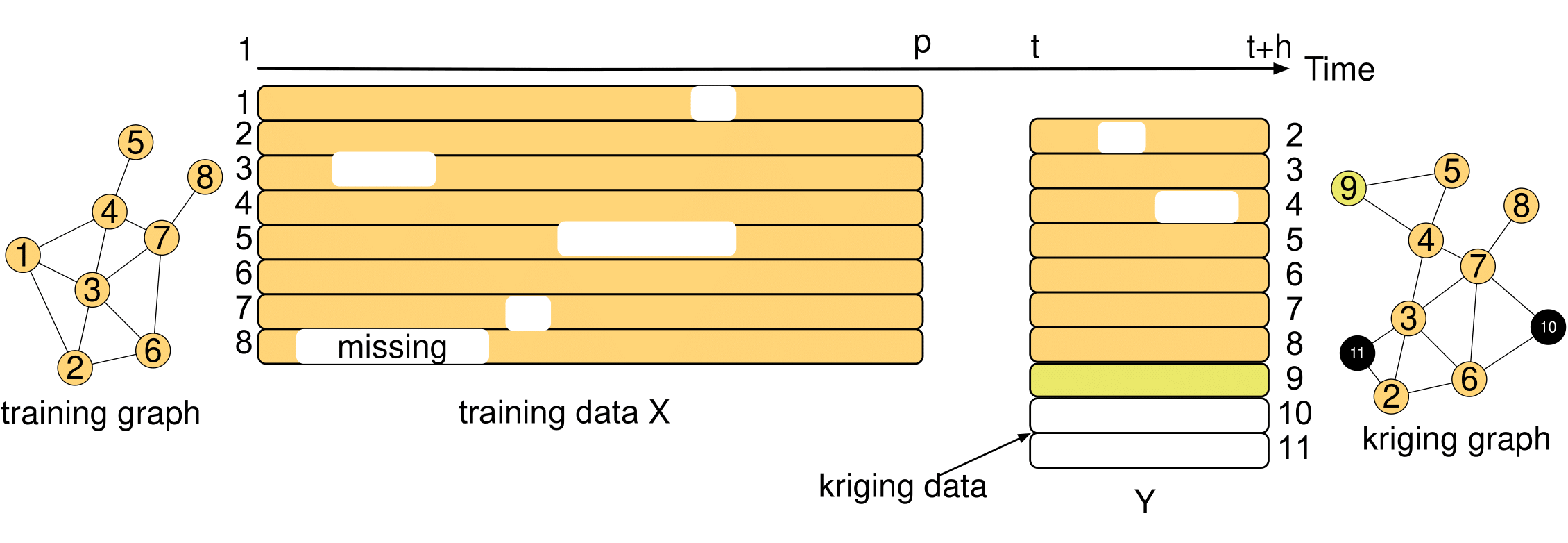
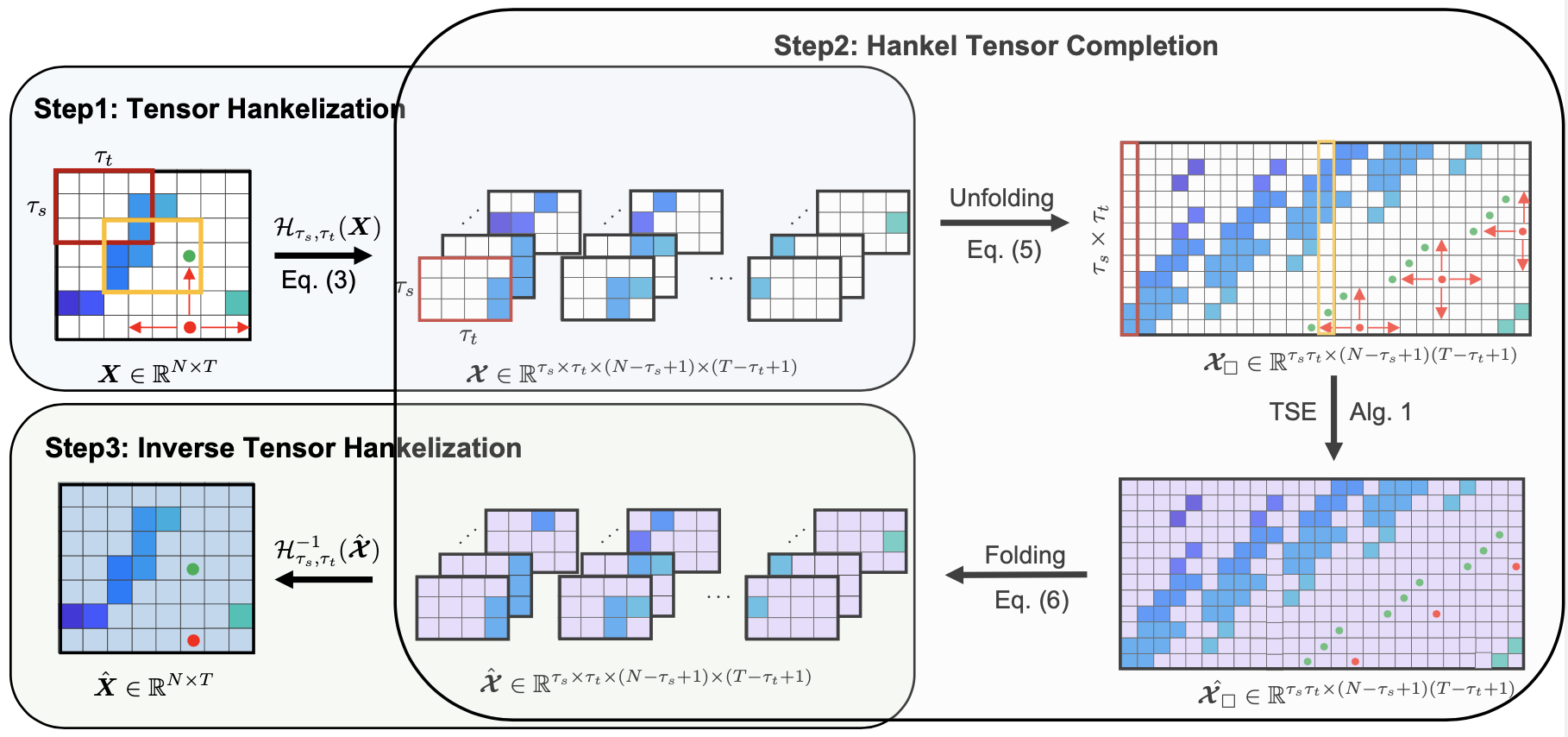
Traffic data serves as a fundamental component in both research and applications within intelligent transportation systems. However, real-world transportation data, collected from loop detectors or similar sources, often contain missing values (MVs), which can adversely impact associated applications and research. Instead of discarding this incomplete data, researchers have sought to recover these missing values through numerical statistics, tensor decomposition, and deep learning techniques. In this paper, we propose an innovative deep-learning approach for imputing missing data. A graph attention architecture is employed to capture the spatial correlations present in traffic data, while a bidirectional neural network is utilized to learn temporal information. Experimental results indicate that our proposed method outperforms all other benchmark techniques, thus demonstrating its effectiveness.
Published in , 2024
National University of Singapore, July. 2018 ~ Sept. 2018
Advisor: Prof. Lee Der-Horng and Prof. Jiangang Jin
Co-worker: Dr. Siyu Hao
Publication: Transportation Research Part C: Emerging Technology
Resources: DOI
Published in , 2024
Massachusetts Institute of Technology, Jun. 2021 ~ Feb. 2022
Advisor: Prof. Shenhao Wang, Prof. Haris N Koutsopoulos, Prof. Jinhua Zhao
Publication: Proceedings of the 28th ACM SIGKDD Conference on Knowledge Discovery and Data Mining
Resources: KDD (Video included) ar5iv GitHub DOI
Published in , 2024
MIT, Mar. 2023 ~ Aug. 2023
Collaborators: Xinke Jiang, Dingyi Zhuang, Xianghui Zhang, Hao Chen, Jiayuan Luo, Xiaowei Gao
Publication: Proceedings of the CIKM 2023
Resources: arxiv GitHub
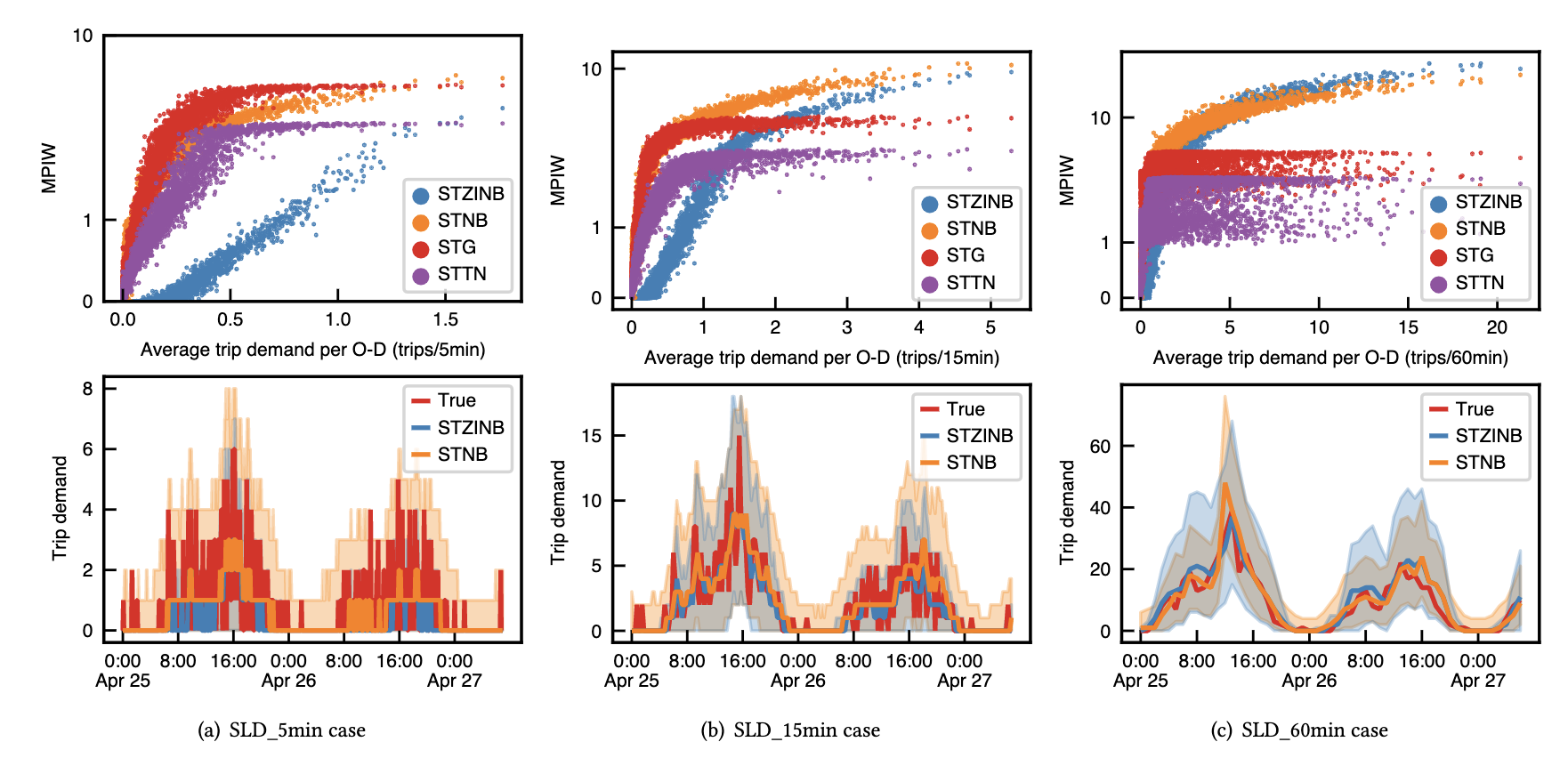
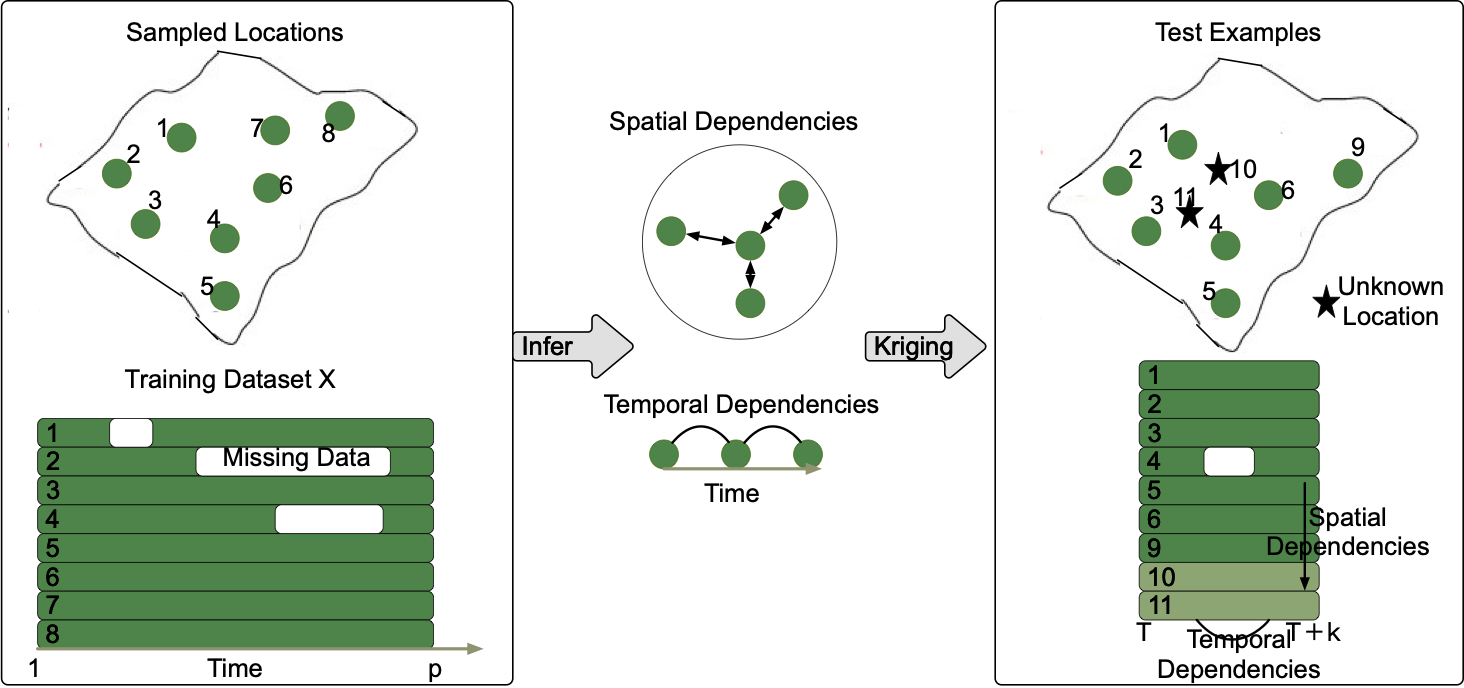
Understanding Origin-Destination (O-D) travel demand is crucial for transportation management. However, traditional spatial-temporal deep learning models grapple with addressing the sparse and long-tail characteristics in high-resolution O-D matrices and quantifying prediction uncertainty. This dilemma arises from the numerous zeros and over-dispersed demand patterns within these matrices, which challenge the Gaussian assumption inherent to deterministic deep learning models. To address these challenges, we propose a novel approach: the Spatial-Temporal Tweedie Graph Neural Network (STTD). The STTD introduces the Tweedie distribution as a compelling alternative to the traditional ‘zero-inflated’ model and leverages spatial and temporal embeddings to parameterize travel demand distributions. Our evaluations using real-world datasets highlight STTD’s superiority in providing accurate predictions and precise confidence intervals, particularly in high-resolution scenarios.
Published in , 2024
MIT, Sep. 2021 ~ May. 2023 Advisor: Prof. Shenhao Wang, Prof. Haris N Koutsopoulos, Prof. Jinhua Zhao Resources: arxiv doi
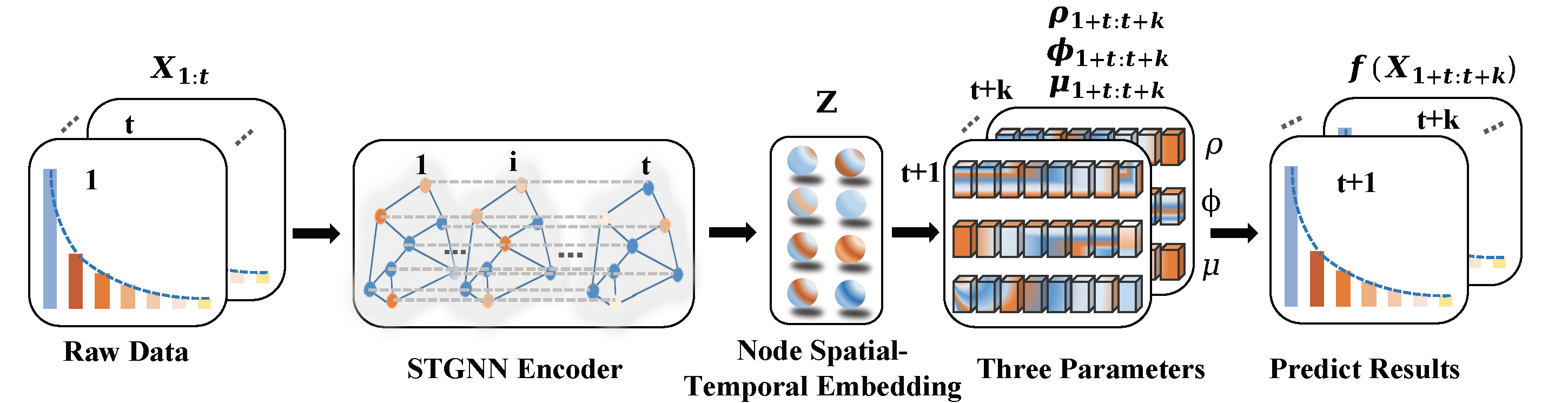
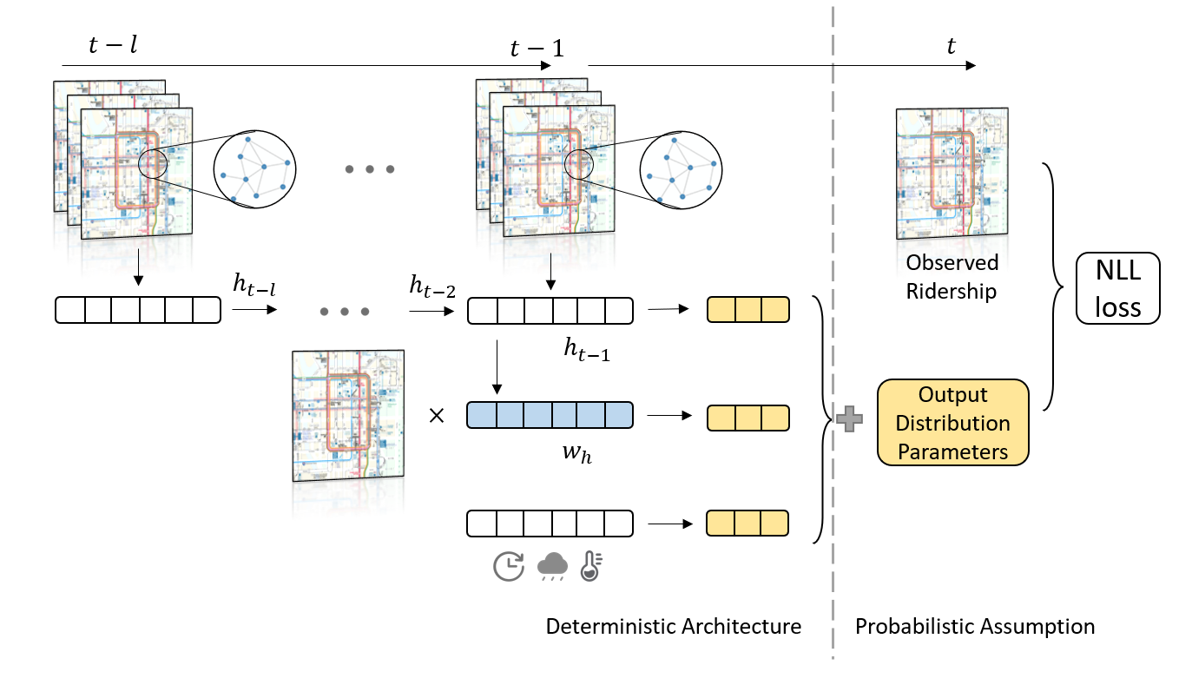
Recent studies have significantly improved the prediction accuracy of travel demand using graph neural networks. However, these studies largely ignored uncertainty that inevitably exists in travel demand prediction. To fill this gap, this study proposes a framework of probabilistic graph neural networks (Prob-GNN) to quantify the spatiotemporal uncertainty of travel demand. This Prob-GNN framework is substantiated by deterministic and probabilistic assumptions, and empirically applied to the task of predicting the transit and ridesharing demand in Chicago. We found that the probabilistic assumptions (e.g. distribution tail, support) have a greater impact on uncertainty prediction than the deterministic ones (e.g. deep modules, depth). Among the family of Prob-GNNs, the GNNs with truncated Gaussian and Laplace distributions achieve the highest performance in transit and ridesharing data. Even under significant domain shifts, Prob-GNNs can predict the ridership uncertainty in a stable manner, when the models are trained on pre-COVID data and tested across multiple periods during and after the COVID-19 pandemic. Prob-GNNs also reveal the spatiotemporal pattern of uncertainty, which is concentrated on the afternoon peak hours and the areas with large travel volumes. Overall, our findings highlight the importance of incorporating randomness into deep learning for spatiotemporal ridership prediction. Future research should continue to investigate versatile probabilistic assumptions to capture behavioral randomness, and further develop methods to quantify uncertainty to build resilient cities.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.